Advanced Micro- and Nanosystems Laboratory

Welcome to The Advanced Micro and Nanosystems Laboratory MEMS, or Micro-Electro Mechanical Systems, are integrated micro devices or integrated systems combining both electrical and mechanical components. Typical examples of MEMS devices are sensors (pressure, velocity), microactuators (micro-mirrors, switches). Important characteristics of MEMS are their sub-millimeter size along with parallel mass production, based on photolithography and integrated circuit (IC) processing technology. Recently MEMS has become increasingly popular in many areas of science and engineering and current applications include micro-actuators, accelerometers, biosensors, pressure, chemical, motion and flow sensors, micro-optics, optical scanners, projection display chip, ink jet nozzle arrays, and fluid pumps and valves. The Advanced Microsystems Laboratory specializes in the development of microactuators and sensors based on various physical phenomena including electrostatic, thermal, electro-magnetic, piezo-electric, piezo-resistive, and electroactive transduction. Additionally, our laboratory is developing a variety of custom electronic interfaces needed in the acquisition of signals from these devices. One common characteristic of these systems is the use of low-cost micro-controllers (primarily from Microchip Inc.), which allow us to develop relatively sophisticated experiments at a fraction of the cost of a general-purpose bench-top instruments.
Contents
Research
Dynamic Stabilization of Electro-Spinning Process for Production of Inflatable Drug-Delivery Stents
(Supported by NSF Grant # 1462752)
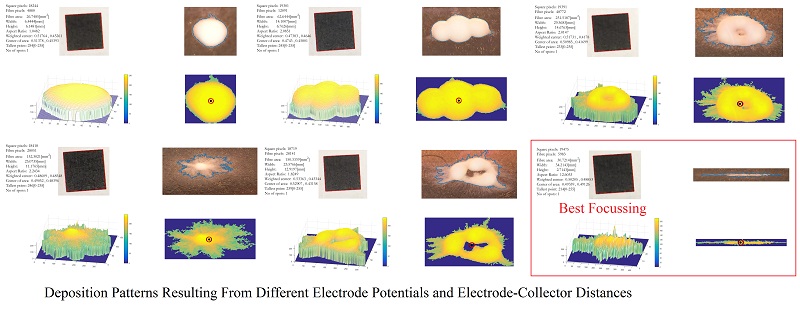
Electrospinning, first discovered in the late 1930's, is a simple and versatile method to create fibers from polymer solutions, with diameters typically ranging from a few nanometers to several micrometers. Currently, this technique is the only method for the fabrication of continuous fibers at the nanometer range. One of the great application areas of electrospinning is tissue engineering, which is aimed at developing artificial or regenerated tissues and organs. Despite its ability to produce very fine fibers, the electrospinning process as a manufacturing technique is poorly controlled. The very same forces responsible for the drawing of fine fibers are also at play in generating an undesirable instability leading to random fiber distribution and localization. The objective of this project is to examine the dynamics of the electrospinning process and develop a method for precise control of fiber deposition. The approach is based on the use of dynamic focusing using a periodic quadrupole field and charge neutralization. Applications of the proposed dynamic focusing method include a demonstration of an inflatable brachytherapy stent composed of periodically aligned nanofibers.
Work on this project includes the development of several dynamic models and resulting simulations showing the fiber deposition
Feasibility Analysis of Self-Administered Eye Tactile Tonometery
This project is aimed at understanding the mechanical response of the human eye during digital palpation. The long term objective of the project is to develop non-invasive techniques for correlating its mechanical response to disease states such as elevated intraocular pressure and glaucoma.
Non-Invasive Spine Biomechanics: Medical Image Segmentation
This new project utilizes the methods of statistical image analysis and machine vision in order to extract kinematic data from medical x-ray radiographs. Of particular interest is the biomechanics of spine and the effects spine fusion surgeries have on the motion of adjacent verterbrae. Using image segmentation technique known as K-means, it is possible to segment an image into sub-sets of clusters represending individual vertebrae in the spine. Subsequent processing of the data allows much more accurate analysis of the radiogrpahs compared to what is possible by direct human observation.
Past Projects
Dynamics of Nanometer Gap Formation in Thermo-Tunneling Devices with Flexible Electrodes One hundred years after the invention of the vacuum triode by Lee De Forest, scientific and commercial interests in vacuum electronic devices are re-emerging. Advances in the micro- and nanofabrication techniques since the era of the first transistor, have created opportunities to devise new micro- and nano-structures, where electron transport across a vacuum gap is no longer based on thermionic emission alone, but also can take place through tunneling across a very narrow vacuum gap. This so-called thermo-tunneling process presents a method for achieving higher current densities at lower temperatures in comparison to the classical vacuum tubes, and therefore, presents an opportunity to devise novel energy conversion devices (electricity generation or cooling). This project investigates the feasibiltiy of achieving uniform vaccum gap over wider areas using distributed electrodynamic forces. Modern stabilization algorithms based on boundary control are being investigated as a means to stabilize the system.
Feasibility Analysis of Self-Administered Eye Tactile Tonometery This project is aimed at understanding the mechanical response of the human eye during digital palpation. The long term objective of the project is to develop non-invasive techniques for correlating its mechanical response to disease states such as elevated intraocular pressure and glaucoma.
Non-Invasive Spine Biomechanics: Medical Image Segmentation This new project utilizes the methods of statistical image analysis and machine vision in order to extract kinematic data from medical x-ray radiographs. Of particular interest is the biomechanics of spine and the effects spine fusion surgeries have on the motion of adjacent verterbrae. Using image segmentation technique known as K-means, it is possible to segment an image into sub-sets of clusters represending individual vertebrae in the spine. Subsequent processing of the data allows much more accurate analysis of the radiogrpahs compared to what is possible by direct human observation.
Publications
Peer-Reviewed Journal Papers
- S McCafferty, G Lim, W Duncan, E Enikov, J Schwiegerling "Goldmann Tonometer Prism with an Optimized Error Correcting Applanation Surface",Translational Vision Science & Technology 5 (5), 4-4
- Eniko T. Enikov and Rein Anton, “Image Segmentation and Analysis of Flexion-Extension Radiographs of Cervical Spines,” Journal of Medical Engineering, vol. 2014, Article ID 976323, 9 pages, 2014. doi:10.1155/2014/976323
- Enikov, E.T.; Edes, G.; Skoch, J.; Anton, R., "Application of GMR Sensors to Liquid Flow Sensing," Microelectromechanical Systems, Journal of , vol.PP, no.99, pp.1,1doi: 10.1109/JMEMS.2014.2359174
- Swan E, Schwiegerling J, Peyman G, Enikov E. Photostress Testing Device for Diagnosing Retinal Disease. Photonics. 2014; 1(3):211-219.
- Polyvas, P. Madarasz, M, and Enikov ET. "Development of Tactile Eye Stiffness Sensor," Journal of Experimental Mechanics, vol. 53 (5), pp. 819-828, 2013 DOI 10.1007/s11340-012-9682-5
- Eniko Enikov; Peter Polyvas; Gholam Peyman, "Trans-scleral tactile tonometry: An instrumented approach," Medical Engineering and Physics, vol. 35 pp. 937-943, 2013
- Mahdi Ganji, Eniko Enikov "Numerical Simulation and Stability Analysis of a Thin Flexible Micro Film For Thermotunneling Application," Transaction on Control and Mechanical Systems, vol 1(4), PP. 158-163, 2012.
- McCafferty SJ, Schwiegerling JT, Enikov ET."Thermal load from a CO2 laser radiant energy source induces changes in corneal surface asphericity, roughness, and transverse contraction,"Investigative Ophthalmology & Visual Science (IOVS), June 2012, Vol. 53, No. 7.
- Enikov, E.T. and Campa, G. "Mechatronic Aeropendulum: Demonstration of Linear and Non-Linear Feedback Control Principles with Matlab/Simulink Real-Time Windows Target," IEEE Transactions on Education, v. 55(4), pp. 538-545, 2012.
- Szabo, Z, and Enikov, E.T., "Developement of Wearable Micro-Actuator Array for 3-D Virtual Tactile Display," Journal of Electromagnetic Analysis and Application, Vol.4 No.6, June 2012.
- Zhang, Z.M., Enikov, E.T., and Makansi, T., “Near-Field Radiative Transfer between Heavily Doped SiGe at Elevated Temperatures,” Journal of Heat Transfe,r, v. 134, 092702-1 2012.
- McCafferty SJ, Schwiegerling JT, Enikov ET. "Corneal surface asphericity, roughness, and transverse contraction following uniform scanning excimer laser ablation,", vol. 53(3), p. 1296-1305, 2012, Invest Ophthalmol Vis Sci. 2012 Feb 1. [Epub ahead of print]
- S. Vohnout, M. Engelman, and E. Enikov, “Miniature MEMS-based Data Recorder for Prognostics and Health Management (PHM),” IEEE Instrumentation & Measurement Magazine, Vol. 14, pp. 18-26, 2011.
- Scott, J. and Enikov E.T. " Novel temperature compensation technique for force-sensitive piezoresistive devices", Journal of Micromechanics and Microengineering, v. 21, pp. 1-8, 2011
- Eppel, A, Enikov E.T., Insperger, T., Stepan, G. Feasibility Study of Optical Detection of Chatter Vibration During Milling, International Journal of Optomechatronics, vol. 4:2, pp. 195 - 214, 2010
- Deng, K. and Enikov, E.T., Design and Development of a Pulsed Electromagnetic Micro-Actuator for 3D Virtual Tactile Displays, Mechatronics vol. 20, pp. 503-509, 2010
- Enikov, E.T. and Makansi, T. Analysis of Nanometer Vacuum Gap Formation in Thermo-Tunneling Devices, Nanotechnology, vol 19, p.1-6,2008
- Enikov, E.T. and Seo G.: Numerical Analysis of Muscle-Like Ionic Polymer Actuators, Biotechnology Progress, Vol.22, p. 96-105, 2006.
- Palaria A and Enikov, E.T.: Experimental analysis of the stability of electrostatic bits for assisted nano-assembly, Journal of Electrostatics, Vol 64, p. 1-9, 2006
- Enikov, E.T., Kedar S and Lazarov,K.V.: Analytical Model for Buckling Analysis and Design of V-Shaped Thermal Micro-Actuators , Journal of Microelectromechanical Systems, Vol. 14, No. 4, pp. 788-797, 2005.
- Enikov, E.T., and Seo G.S.: Experimental Analysis of Current and Deformations of ion-exchange Polymer Metal Composite Actuators, Experimental Mechanics, Vol. 45, .No. 4, pp. 383-391, 2005.
- Eniko T. Enikov, Lyubomir L. Minkov and Scott Clark,: Micro-Assembly Experiments with Transparent Electrostatic Gripper Under Optical and Vision-Based Control, IEEE Transactions on Industrial Electronics, Vol. 52, No. 4, pp. 1005-1012, 2005.
- Enikov, E.T., and Seo G.S.: Analysis of water and proton fluxes in ion-exchange polymer-metal composite (IPMC) actuators subjected to large external potentials, Sensors and Actuators A, Vol 122, no. 2, pp.264-272, 2005
- Enikov, E.T., and Lazarov,K.V.: Micro-mechanical switch array for meso-scale actuation, Sensors and Actuators A, Vol 121, no.1, pp.282-293, 2005
- Enikov, E.T. and Palaria,: Charge writing in silicon-silicon dioxide for nano-assembly, Nanotechnology, Vol. 15,Issue 9, Pages 1211-1216, 2004.
- Enikov, E.T. and Lazarov, K. V. :An optically transparent gripper for micro-assembly, Journal of Micromechatronics Vol. 2, No. 2, p 121-140, 2003
- Enikov, E.T. and Lazarov, K. V.: PCB-integrated metallic thermal micro-actuators, Sensors and Actuators A: Physical vol.105, no.1, pp.76 -82, 2003.
- Sun, Y., Nelson, B.J., Potasek, D.P., Enikov, E.: A Bulk Microfabricated Multi-Axis Capacitive Cellular Force Sensor using Transverse Comb Drives , Journal of Micromechanics and Microengineering ,12:832-40, 2002.
- Vikramaditya B, Nelson B.J., Yang G., Enikov E.T. : Microassebly of hybrid magnetic MEMS, Journal of Micromechatronics,12:99-174,2001.
- Enikov, E.T. and Nelson, B.: Three Dimensional Microfabrication for Multi-Degree of Freedom Capacitive Force Sensor Using Fiber Chip Coupling. Journal of Micromechanics and Microengineering ,10:492-497, 2000.
- Enikov, E. and Boyd, J.C..: A Finite Element Formulation for Anodic Bonding . Smart Materials and Structures 9:737-750,2000.
- Enikov, E. and Boyd, J.: A Thermodynamic Field Theory for Anodic Bonding of Micro Electro-Mechanical Systems (MEMS).International Journal of Engineering Science , 38:135-158, 2000.
- Enikov, E. and Boyd, J.: Electroplated Electro-Fluidic Interconnects for Multi-Chip Modules. Sensors and Actuators A, 84:161-164, 2000
- Enikov, E. and Stepan, G.: Microchaotic Motion of Digitally Controlled Machines. Journal of Vibration and Control 4: 427-443, 1998.
- Enikov, E. and Stepan, G.: Digital Stabilization of Unstable Equilibria. Zitschrift fur Angewandte Mathematik und Mechanik, 75: S111-S112, 1995.
- Enikov, E. and Stepan, G.: Stabilizing an Inverted Pendulum - Alternatives and Limitations. Periodica Polytechnica 38:19-26, 1994.
Patents
- Contoured facial mask with multiple contact probes for use with tactile tonometer, Inventors: Eniko T. Enikov, US Patent 9,155,467, 2015
- Thermal Micro-Actuator Based on Selective Electrical Exitation, Inventors: Susan C. Bromley,Bloomington,MN(US); Bradley J. Nelson,North Oaks,MN(US); Karl Vollmers, Crystal,MN(US); Arunkumar Subramaniam, Minneapolis ,MN(US); Eniko Enikov,Tucson, AZ(US); Kamal Deep Mothilal, Minneapolis ,MN(US). Patent No.: US 6,739,132 B2,
- Eye Tonometry Apparatus, Systems, and Methods, Iventors: Enikov E.T. and Peyman, G. U.S. Patent # 7,959,570 B2, June 14, 2011.
Books and Book Chapters
- Eniko T. Enikov, P. P. Polyvas, R. Janco, and M. Madarasz: "Evaluation and Testing of Novel Ocular Tactile Tonometry Device," in Mechatronics 2013: Recent Technological and Scientific Advances (T. B?ezina and R. Jablo?ski, eds.), Springer, 2014, pp. 847-854.
- Eniko T. Enikov and Geon S. Seo: Ch8: "Sensors and Actuators for Life Science Automation," in Life Science Automation: Fundamentals and Applications (M. Zhang, B.Nelson, and R. Felder, eds.), Artech House Publishers, 2007, pp. 219-254.
- Enikov, ET, Introduction to Microsystems and to the Techniques for Their Fabrication, in Microsystems Mechanical Design, Eds. DeBona, F and Enikov, ET, Series: CISM International Centre for Mechanical Sciences , Number 478 , Springer, 2006
- Lazarov KV, and Enikov, ET. Micro-mechatronics and MEMS: capacitive position detection, in Microsystems Mechanical Design, Eds. DeBona, F, Enikov, ET, Series: CISM International Centre for Mechanical Sciences , Number 478, Springer, 2006
- Enikov, ET, Ch. 8: Structures and Materials, in The Mechatronics Handbook, Edited by Robert Bishop, CRC press, 2002
Conference Papers and Presentations
- E. Enikov & J. Escareno, Application of Sensory Body Schemas to Path Planning for Micro Air Vehicles (MAVs), 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), Colmar, France.
- Eniko Enikov, Zoltan Szabo, "Engineering Innovation in Biomedical Nanotechnology", ASME's International Mechanical Engineering Congress and Exposition (IMECE 2015-50911), November 13-19 Houston, TX.
- Eniko Enikov, J. Escareno, Micky Rakotondrabe, "Image Schema Based Landing and Navigation for Rotorcraft MAVs", ASME's International Mechanical Engineering Congress and Exposition (IMECE 2015-51450), November 13-19 Houston, TX.
- Eniko Enikov, Peter P. Polyvas, Gholam Peyman, Sean McCafferty, "Tactile Eye Pressure Measurement Through the Eye Lid", ASME's International Mechanical Engineering Congress and Exposition (IMECE 2015-50875), November 13-19 Houston, TX.
- Giuseppe Habib, Akos Miklos, Eniko T. Enikov, Gabor Stepan, and Giuseppe Rega, "Experimental Validation of the Act-and-Wait Control Concept Through the Aeropendulum", Proceedings of 11 International Conference on Vibration Problems,Lisbon, Portugal, 9–12 September 2013
- Orendain, A, Francisco Carrasco,J., Peyman, G.,Enikov, ET "Evaluation of Electro-Spun Tubular Scaffolds to Create an Anastomosis Using the CAM Assay", Proceedings of ASME International Mechanical Engineering Congress & Exposition, November 15-21, 2013, San Diego, California, Paper IMECE2013-64687.
- Enikov, E.T. and Ganji M. "Application of DQM Method to the Steady State Analysis of Thermo-Tunneling Electrodes", Proceedings of ASME International Mechanical Engineering Congress & Exposition, November 15-21, 2013, San Diego, California, Paper IMECE2013-64676.
- Enikov, E.T. and Polyvas, PP. "Development of a Non-Invasive Calibration Method for Ocular Tactile Tonometry", Proceedings of ASME International Mechanical Engineering Congress & Exposition, November 15-21, 2013, San Diego, California, Paper IMECE2013-63380.
- Enikov, E.T., Polyvas, P., Janco R. and Madarasz, M., "Evaluation and Testing of Novel Ocular Tactile Tonometry Device", Proceedings of 10th International Conference on Mechatronics, Brno, Czech Repulic, Oct. 7-9, 2013, Paper 3372.
- Enikov, E.T., Polyvas, P. "Development of a Non-Invasive Calibration Method for Ocular Tactile Tonometry", Proceedings of ASME International Mechanical Engineering Congress & Exposition, November 15-21, 2013, San Diego, California,2013, Paper IMECE2012-63380 .
- Enikov, E.T. and Ganji M. "Stability Analysis of Flexible Thermo-Tunneling Electrodes", Proceedings of ASME International Mechanical Engineering Congress & Exposition, Houston, November 9-15, 2012, Paper IMECE2012-86980.
- Enikov, E.T., Polyvas, P., and Madarasz, M., "Experimental and Numerical Analysis of Ocular Tactile Tonomtery", Proceedings of ASME International Mechanical Engineering Congress &
Educational Activities
NUE: Engineering Innovation in Biomedical Nanotechnology
These experiments have been developed with support from the National Science Foundation under DUE grant# 0633312 and 1446098
Keeping up with the fast development of modern technology requires students to prepare for a life-long learning and self-training. To achieve this, students need to acquire skills for independent study and the ability to solve open-ended design problems. The micro- and nanotechnology field presents a unique opportunity to foster such skills by exposing students to disciplines outside of their major. Additionally, micro-technology experiments involve the use of instrumentation and system analysis, which are part of traditional undergraduate curricula in US. Therefore, a laboratory experience based on MEMS/NEMS stands a chance of addressing the needs of traditional laboratory instruction and access to new and exciting applications. Unfortunately, the cost of micro-technology education often reduces such classes to a mere laboratory demonstration. Therefore, the objective of this project is to develop tools that could provide affordable access to fabrication and testing of MEMS and NEMS devices. Additionally, the objective is to derive experiments that could replace or augment classical mechatronics and controls courses by using the same data acquisition hardware developed for the micro-technology experimentation. Thus, this project includes two modules:
(1) MEMS/NEMS based experiment; and
(2) Mechatronics/Controls Design Experiment. For more information click on the links below.
International Collaboration
Our laboratory has ongoing collaborations with the following foreign instututions. Collaborations include student exchange, internships, and joint research projects
- Department of Applied Mechanics, Budapest University of Technology and Economics
- Institute of Applied Mechanics and Mechatronics, Slovak Technical University
- IPSA - L’Institut Polytechnique des Sciences Avancées (French Polytechnique offering 5-year degrees in aerospace engineering)
Duble Degree Agreements
International Aerospace Internship Program and Double Degree with IPSA. See IPSA_Double_Degree
Employment and Research Volunteer Opportunities
The AMNL is always looking for highly motivated graduate and undergraduate students interested in research opportunities. Preference will be given to students interested in completing a PhD or M.Sc. degree in the Department of Aerospace and Mechanical Engineering. Required technical skills include two or more of the following:
- Ability to design and prototype electronic circuit boards OR willingness to be trained Micro-controller programming and application OR willingness to be trained
- Ability to operate laboratory instrumentation (oscilloscopes, multi-meters, function generators, AFM, laser lithography tool, spectrophotometer) OR willingness to be trained
- AutoCAD 2D and 3D drawing and use of MATLAB
Successful applicants should be "team players", i.e. they are expected to be willing to work with other students, receive training and be willing to commit their time to train and assist fellow lab mates. Ongoing projects in the lab include:
- Cantilever bio-chemical sensors using laser readout technique
- Tactile electromagnetic micro-actuators and positioning system (tactile display)
- Development of optical and mechanical eye tonometry device
Interested candidates should send a curriculum vitae and a statement describing their experience and interests to Prof. Enikov (enikov-at-email.arizona.edu). The statement should explicitly address the specific skills listed above.
Sponsors and Granting Agencies
- Air Force Office of Scientific Research (AFOSR)
- National Science Foundation (NSF)
- US Dept. Of Education (DE)
- US Dept. of Energy (through MP Technologies, Inc. and Sandia National Labs)
- Private Sector and Donors
People
Head Of Laboratory - Prof. Eniko T. Enikov
Graduate Students
- Gergo Edes , PhD Student
- Rudolf Kyselica, PhD Student
- Zoltan Szabo, PhD Student
- Mohsen Azimi, PhD Student
- Phillip Vidinski, MSc Student
- Nourledyn Al Zein, MSc Student
- Kevin Jacquinot, MEng Student
Postdoctoral Associates
- Jesus Acosta
- Jenny Taubert
- Peter Polyvas
Undergraduate Students
- Benito Pimienta
- Jerry Perez
Alumini
- Mahdi Ganji (Ph.D., ME 2015)
- Peter Polyvas (Ph.D., ME 2014)
- Vasco Polyzoev (Ph.D., ME 2011)
- Kai Deng (Ph.D., ME 2009)
- Geon Seok Seo (Ph.D., ME 2004)
- Kalin V. Lazarov (Ph.D., ME 2004)
- Peter Munz (M.S. ME 2014)
- Zoltan Szabo (M.S., ME 2014)
- Wendi Sun (M.Sc. ME 2013)
- Carlos Gamez (M.Sc. ME 2012)
- Rishikesh Velkar (M.Sc. ME 2012)
- Vincent Glowacka (M.Sc., ME 2009)
- Joshua Scott (M.Sc., ME 2009)
- Edward White (M.Sc., ME 2008)
- Amritanshu Palaria (M.Sc., EE, 2005)
- Shantanu Kedar (M.Sc., ME, 2004)
- Lyubomir Minkov (Transferred to ECE)
- Deepak Agrawal (M.Sc., ME 2003)
- Sara Kuwahara (M.Sc., ABE 2003)
- Thomas Brown (B.Sc. 2010)
- Alex Luce (B.Sc., 2009)
- Tiffany Miller (B.Sc., ME 2006)
- Nima Forghani (B.Sc., A ME 2005)
Labtour
Take A Tour of The Equipment in AMNL

Micro PG 101 Pattern Generator (Laser Mask Writer)

Freeze-drier and Lab Refrigerator

CO2 Incubator

Refrigerated Centrifuge 4000 rmp, 200ml

Humidity Test Chamber

Optical Vibration Isolation Table
Dimension 3100 AFM Microscope

Signatone S1110 Probe Station
Spectrophotometer Cary 50 and Gamry Impedance Analyzer